Hardware overview
In this section, we will cover all the necessary hardware. Upcoming is a list of all the hardware used. Of course, you can use anything else you want instead of the ones mentioned here, but I think that the list is cheap enough to build your first robot. To sum up, we will build a two-wheeled robot with encoders, using Arduino Mega as the controller board and lastly a Bluetooth to have a connection with our Android application:
- DC motor and wheels
- Motor encoders
- Arduino microcontroller
- Motor shield
- Servo
- Ultrasonic distance sensor
- Bluetooth
- Breadboard
- Battery
- Other components
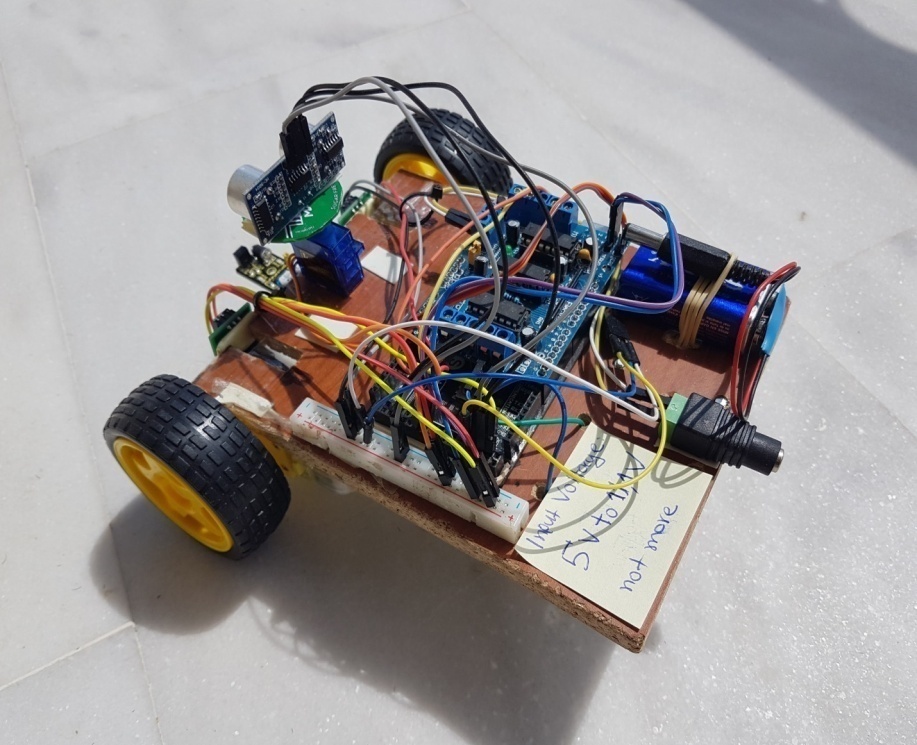
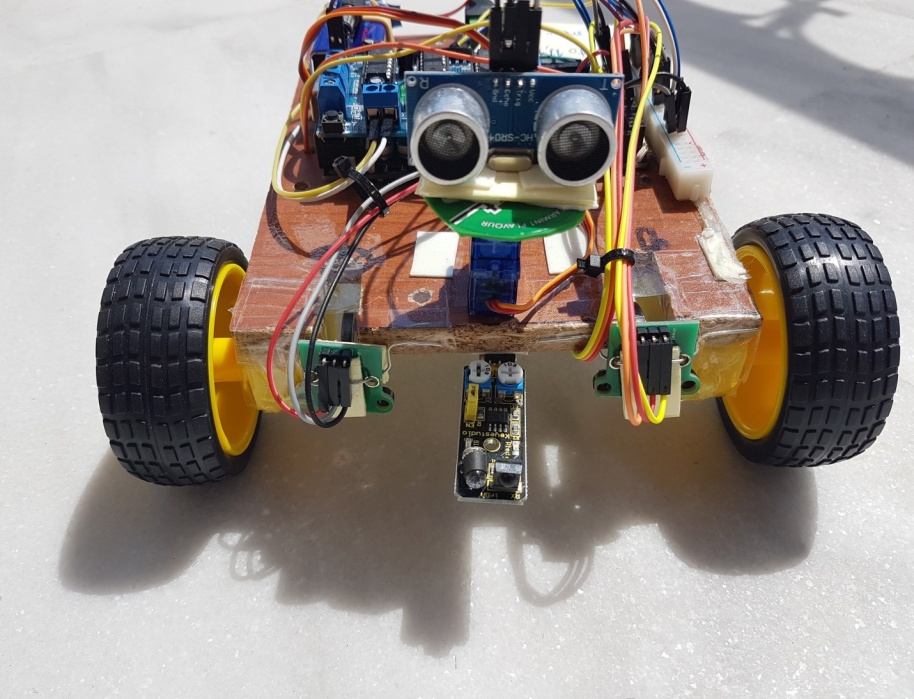
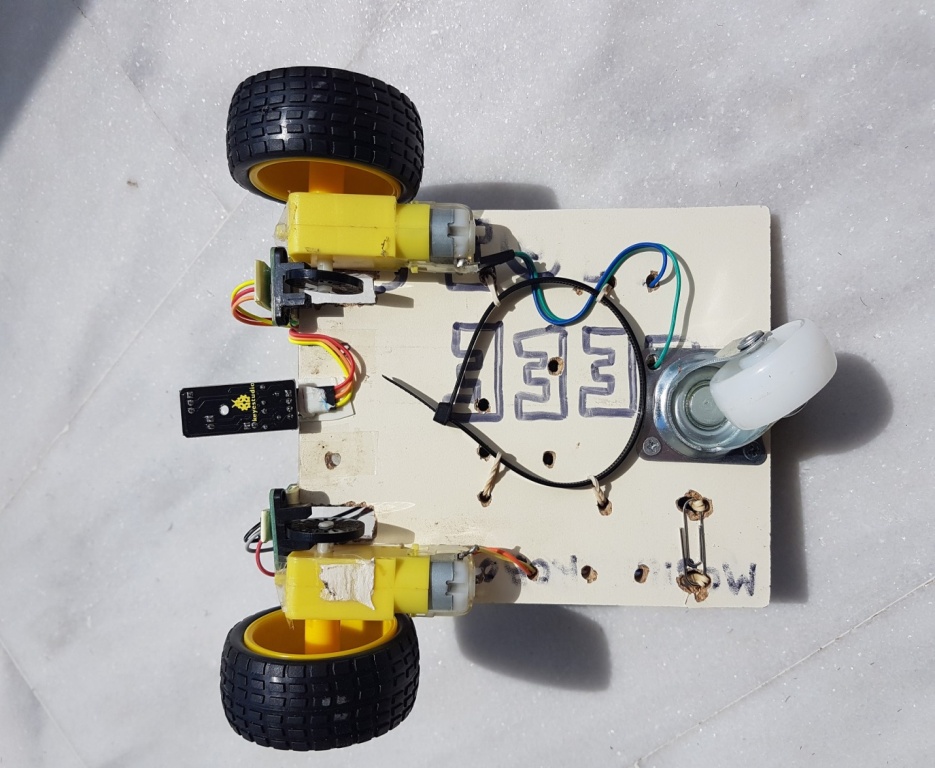
The final robot that we will make is as follows:
DC motor and wheels
As we have already described, the DC motor is an actuator, the component that will produce the vehicle speed. We will use simple DC motors that are quite cheap and easily found on the market. The DC motors used are controlled from 3V to 11V and they look like this:

They have an axis in which one side is for the wheel and the other for the encoder...