Universal robot controller for UGV
Before deep diving into the controller, clone the following GitHub repository to your PC. The code is itself around 350+ lines so some parts are to be discussed:
https://github.com/avirup171/bet_controller_urc
So initially let's design the UI first:
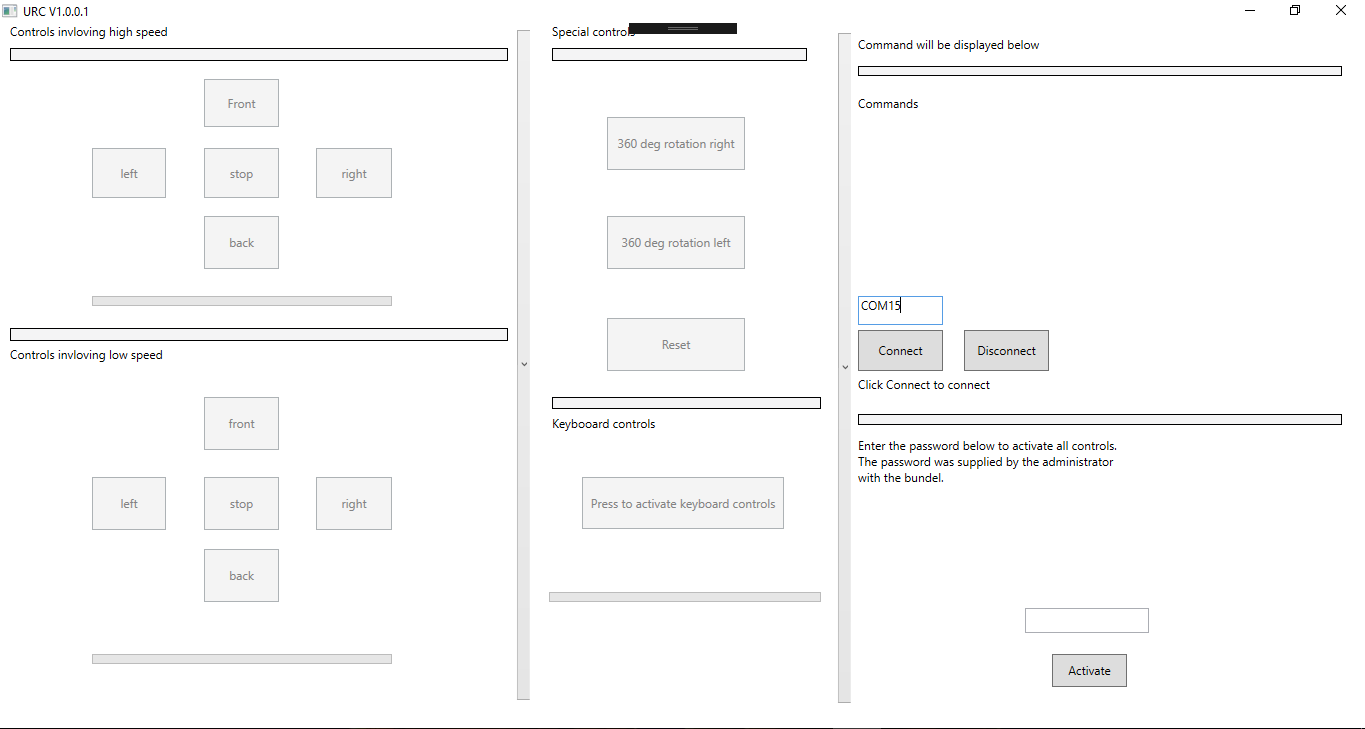
Screenshot of URC
For simplicity two sections of fast and slow controls are included. However it can be merged into one and using a checkbox. We have a connection pane on the right hand top side. The commands are displayed. A default password for 12345 was added which was done to avoid crashes and unauthorized use. However it's a simple controller and can be used with UGVs pretty much efficiently.
If you have a close look over the UI, then you will find a button named Press to activate keyboard control. Once you click on the button, the keyboard control gets activated. Now here you need to assign keyboard pressed and keyboard release event. This can be done by selecting the control and in the properties windows,...