






















































Hardware
We will use the Falcon as the base robot and do some modifications that will enable it to navigate autonomously. Make sure that you have read the previous chapter and that you are familiar with how the Falcon's hardware works before you proceed.
We will be adding two navigation sensors to the Falcon: a Dexter Industries dGPS and a HiTechnic compass sensor. We will take a look at how each of these sensors works and how they will enable the Falcon to navigate autonomously:
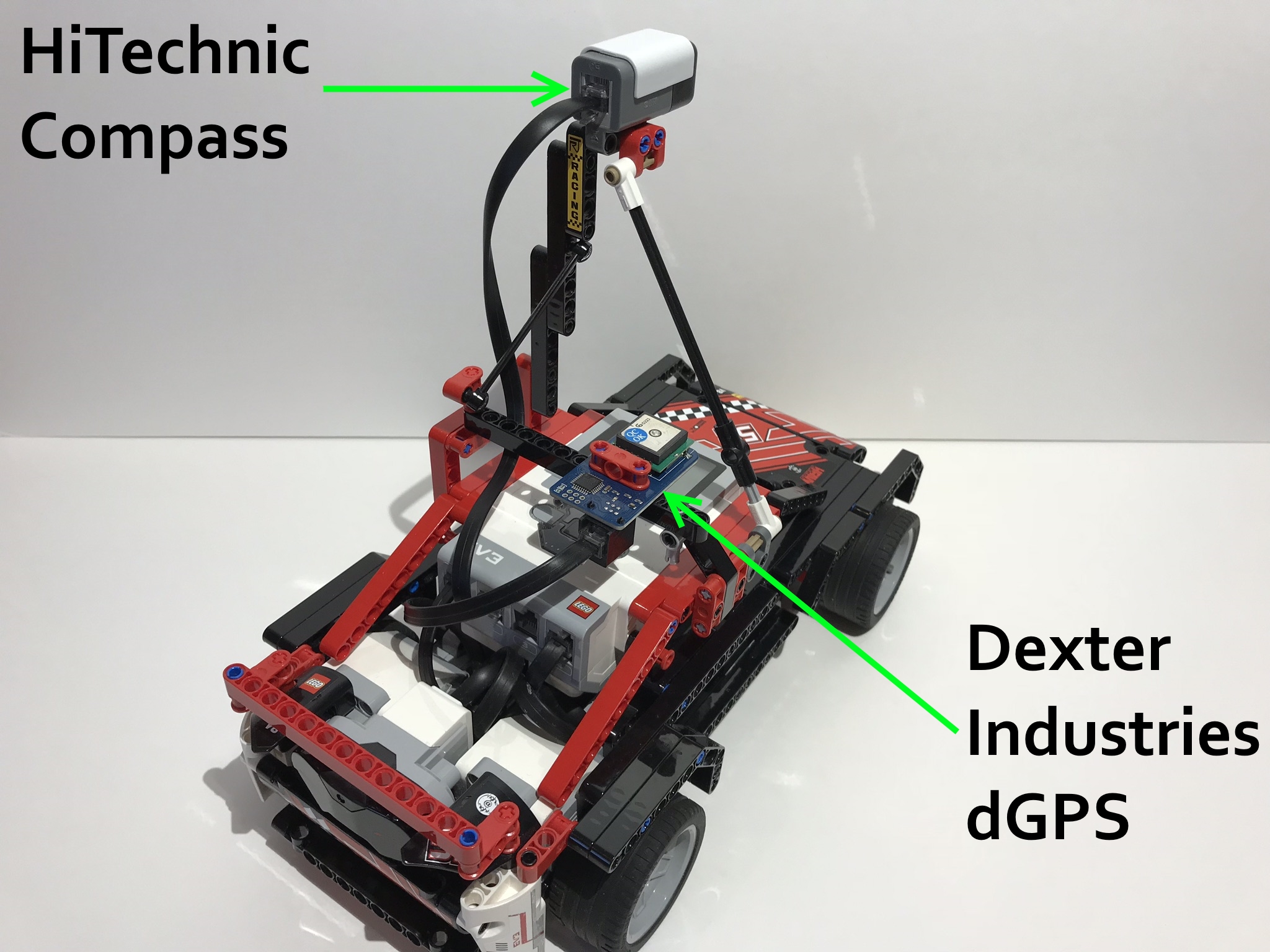
Dexter Industries dGPS
This is a simple GPS chip that connects to the satellites that orbit the Earth to give us an estimate of where the EV3 is in the world. The dGPS provides information such as UTC (time), latitude, longitude, heading, velocity, and satellite link status. We will only need the first three when we write the programs for this project.
On one side of the board is the GPS antenna and the signal LED. The other side is where the battery and sensor plug are mounted. When mounting the dGPS on a robot, the...






