






















































Mechanical design
There are a lot of interesting techniques used in Grunt's design. We will take a glance at each one.
Walking mechanism
What makes Grunt stand out from all of the other projects in this book is that he does not use wheels or tank tracks to move around. Instead, he has a simple walking mechanism that allows him to move around on two legs.
Two EV3 large motors power the legs, one for each leg (ports B and C). Each motor directly drives a large 36-tooth bevel gear, which serves two purposes—it acts as a cam onto which one point of the leg is attached, and it transfers the motor's power through a 12-tooth gear to a second 36-tooth bevel gear, which acts as the second point on which the leg is attached. When the motor runs, the entire leg moves in a circular stepping motion. The two legs can move independently of one another:
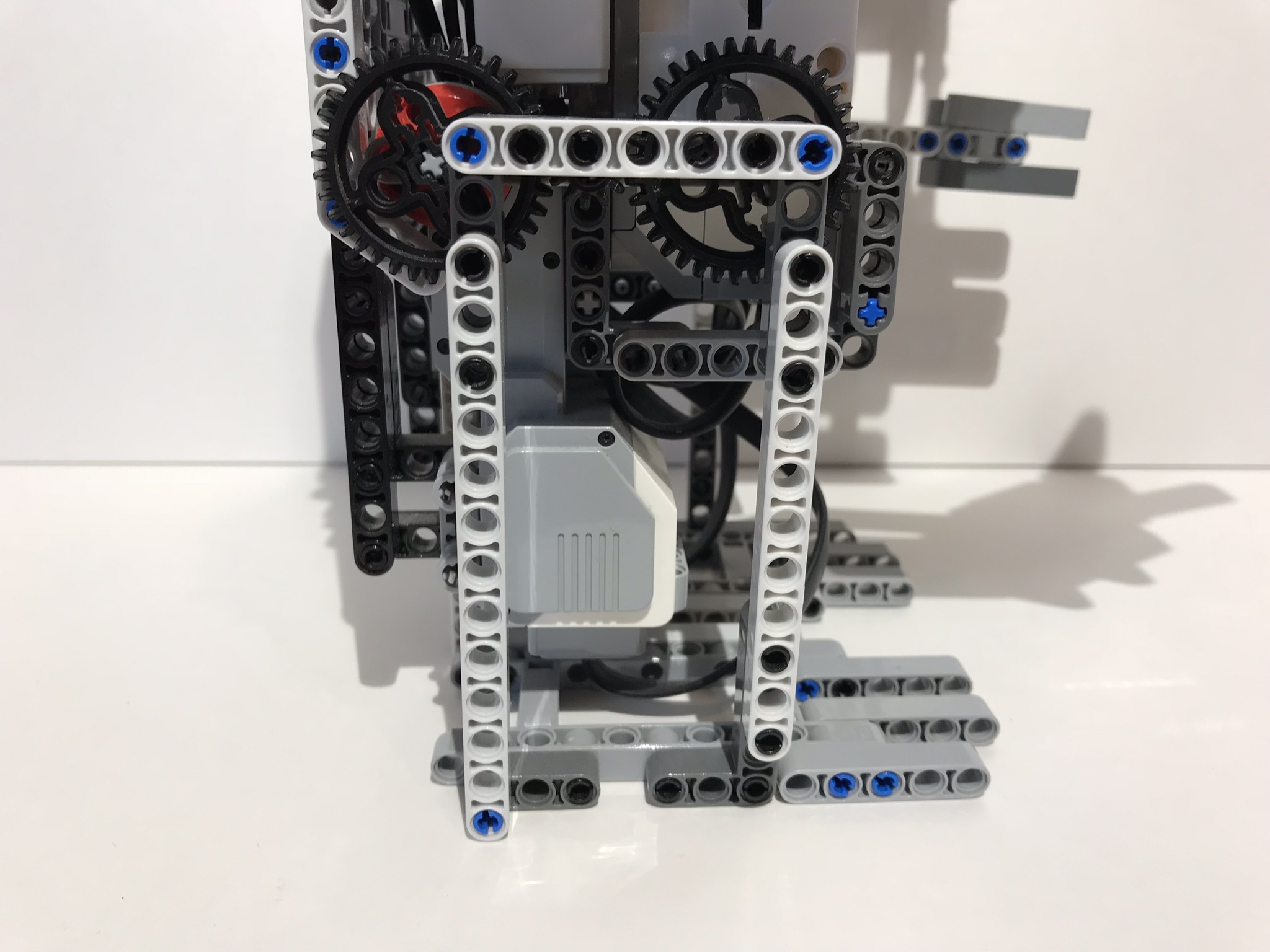
Because these legs need to support the weight of the whole robot, each leg is reinforced using another beam, which attaches directly to the motor's red hub...






