This function returns the list of nodes that should hold a given key (up to N distinct nodes). It’s the backbone of both the write and read paths – writes go to these N nodes, reads query a subset (of size R) of them. From an SLO perspective, GetNodesForKey provides the scope of where we must monitor consistency for each item. We could instrument right after a write is accepted to track convergence. Also, if a read at consistency level < ALL is performed, using this function we could compare the version it got to other replicas’ versions – if one of the other replicas has a higher version, that read was stale. This check could increment the stale-read counter. Essentially, GetNodesForKey lets us pinpoint which replicas to compare; it’s where we “measure” consistency across the replica set.
For conflict detection, we already discussed vector clocks. Instrumentation-wise, whenever the system merges vector clocks (after a write or read repair), it can check if the merge resulted in multiple surviving branches. If yes, increment the conflict metric. The VectorClock type above is simple, but in usage, e.g., vc1 := VectorClock{ "nodeA":5, "nodeB":3 } and vc2 := VectorClock{ "nodeA":5, "nodeB":4 } would be compared – if neither dominates, you have a conflict. By observing how often that happens (and perhaps how many versions result), we quantify the “consistency anomalies” experienced.
Throughout the code, there are many places to emit metrics: when writes succeed or fail the quorum check, when read repair runs (count how many rows repaired), size of hinted-handoff queues, etc. The key is to map them to our SLO. For instance, after the Write successful log above, we might record the lagging replicas count (N - ackCount) for that write – if >0, that write contributes to potential staleness until those catch up. Summing such lag over time or tracking the max lag can inform convergence times. Similarly, each read could log the staleness age (now - last_write_timestamp seen) for that item. These instrumentations ensure that the theoretical SLI definitions (stale-read rate, staleness age, etc.) have concrete counters and timers in the running system.
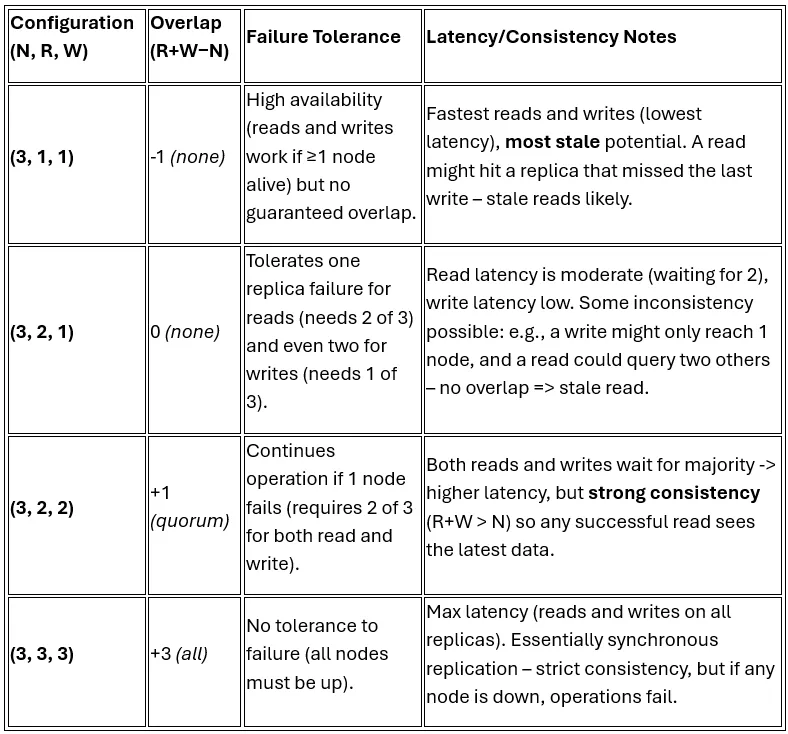
With careful tuning (quorum sizes, repair cadence) and diligent monitoring, teams can reap the benefits of high availability while keeping staleness within acceptable bounds.

 United States
United States
 Great Britain
Great Britain
 India
India
 Germany
Germany
 France
France
 Canada
Canada
 Russia
Russia
 Spain
Spain
 Brazil
Brazil
 Australia
Australia
 South Africa
South Africa
 Thailand
Thailand
 Ukraine
Ukraine
 Switzerland
Switzerland
 Slovakia
Slovakia
 Luxembourg
Luxembourg
 Hungary
Hungary
 Romania
Romania
 Denmark
Denmark
 Ireland
Ireland
 Estonia
Estonia
 Belgium
Belgium
 Italy
Italy
 Finland
Finland
 Cyprus
Cyprus
 Lithuania
Lithuania
 Latvia
Latvia
 Malta
Malta
 Netherlands
Netherlands
 Portugal
Portugal
 Slovenia
Slovenia
 Sweden
Sweden
 Argentina
Argentina
 Colombia
Colombia
 Ecuador
Ecuador
 Indonesia
Indonesia
 Mexico
Mexico
 New Zealand
New Zealand
 Norway
Norway
 South Korea
South Korea
 Taiwan
Taiwan
 Turkey
Turkey
 Czechia
Czechia
 Austria
Austria
 Greece
Greece
 Isle of Man
Isle of Man
 Bulgaria
Bulgaria
 Japan
Japan
 Philippines
Philippines
 Poland
Poland
 Singapore
Singapore
 Egypt
Egypt
 Chile
Chile
 Malaysia
Malaysia